
|
Note:
|
This page is used to show the configuration of the Configurable Antenna Tower device driver. This page can now easily be embedded on all relevant device driver pages.
|
The following tabs are available in the advanced configuration of the ConfigurableAntennaTowerDeviceDriverConfiguration:
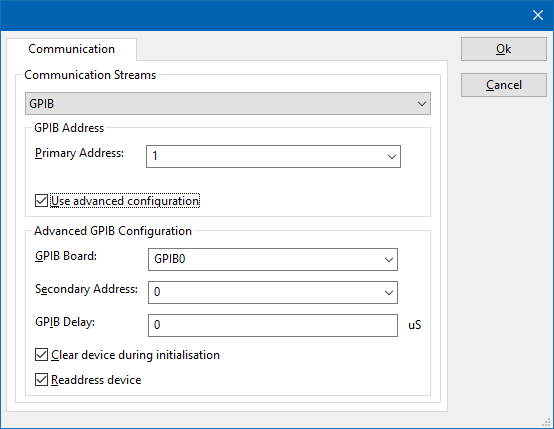
On the Communication tab, the desired communication method can be selected and configured. Depending on the selected method, additional relevant settings are shown and can be configured.
 Communication Streams Communication Streams
|
Selects the medium or method that should be used to communicate with the device. Depending on the capabilities of the device this can be one or more of:
See the Communication Settings in Chapter 15, on how to configure each of these methods.
|
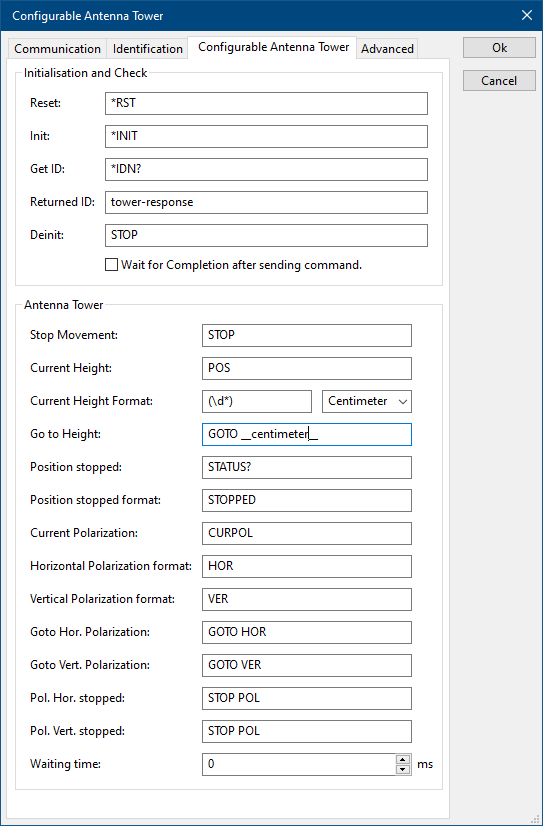
On the Configurable antenna tower tab, the specific commands to control an antenna tower can be specified.
Initialisation and Check
| Reset
|
The reset code that needs to be send to device. When left blank, no command will be send.
|
| Init
|
The command that is send to initialize the configured device. When left blank no command will be send.
|
| Get Id
|
The command that is send to retrieve the ID of the device. This is used to check if the device is connected. A commonly used SCPI command is: *IDN?. When left blank, no command will be send.
|
| Returned ID
|
The identifier is used to check if the correct device driver is selected and the device is connected. Leaving this blank, will skip the device check.
|
| Deinit
|
Specifies the command that is send when the device is no longer controlled. This can for example be used to put the measurement device is an intrinsic safe state. Leaving this blank, will keep the device in its last state after controlling it.
|
| Wait for Completion after sending command
|
The checkmark can be enabled so RadiMation® will wait for all the commands to complete, before it continues. This is done by sending SCPI command *OPC? to the device.
|
Antenna Tower
| Stop Movement
|
The command that is send to stop the antenna tower. When left blank, no command will be send.
|
| Current Height
|
The command that is send to request the current height. When left blank no command will be send.
|
| Current Height Format
|
A regular expression to parse the response from the Current Height request. The received value will be interpreted as being the the unit in Meter, Centimeter or Millimeter, as selected by the dropdownbox.
|
| Go to Height
|
The command that is send to move the antenna tower to a certain height. The command must include a keyword, __meter__, __centimeter__ or __millimeter__ which will be replaced with the corresponding height for the antenna tower. When left blank, no command will be sent.
|
| Position stopped
|
The command that is send to request the status if the antenna tower is moving. When left blank, no command will be send.
|
| Position stopped format
|
A regular expression which will be matched against the response of the Position stopped command. When the result is matching with the response, the tower is stopped.
|
| Current Polarization
|
The command to request the current polarisation. It is mandatory to also supply the format of the polarization in the next fields. When left blank, no command will be sent.
|
| Horizontal Polarization format
|
A regular expression which will be matched against the response of the Current Polarization command. When the result is matching the driver reports Horizontal back to RadiMation.
|
| Vertical Polarization format
|
A regular expression which will be matched against the response of the Current Polarization command. When the result is matching the driver reports Vertical back to RadiMation.
|
| Hor. Polarization
|
The command that is send to change the polarization to horizontal. When left blank, no command will be send.
|
| Vert. Polarization
|
The command that is send to change the polarization to vertical. When left blank, no command will be send.
|
| Pol Hor. stopped
|
The command that is send after the command Hor. Polarization is sent, with a delay of Waiting time between the two commands. When left blank, no command will be send.
|
| Pol Vert. stopped
|
The command that is send after the command Vert. Polarization is sent, with a delay of Waiting time between the two commands. When left blank, no command will be send.
|
| Waiting time
|
The wait time, specified in milli seconds, between the Polarization command and Polarization stopped commands.
|

